platforms/boards/pyboard/modpyb/Timer Examples

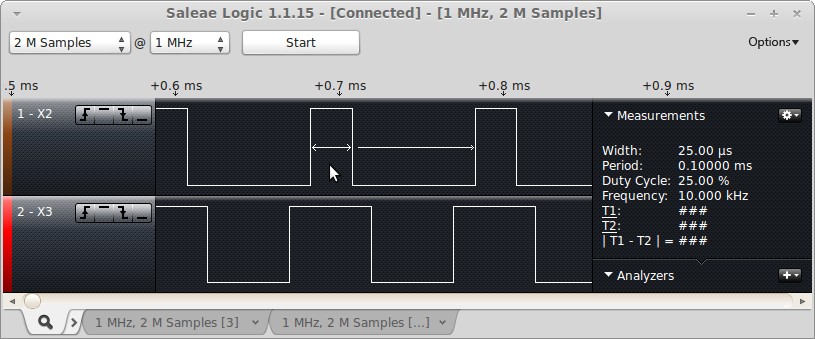
PWM @ 10 kHz on pins X2 and X3 in center mode.
Pin X2 is 25% duty cycle, and X3 is 50% duty cycle.
import pyb # TIM2 runs at 84 MHz # at 20000 Hz, count runs from 0 to 4199 # In center mode, the frequency will be halved, so we'll get a 10 kHz output t2 = pyb.Timer(2, freq=20000, counter_mode=pyb.Timer.COUNTER_MODE_CENTER) ch2 = t2.channel(2, mode=pyb.Timer.PWM, pin=pyb.Pin.board.X2, pulse_width=((t2.period() + 1) // 4) - 1) ch3 = t2.channel(3, mode=pyb.Timer.PWM, pin=pyb.Pin.board.X3, pulse_width=((t2.period() + 1) // 2) - 1)
This is what the signal looks like on a logic analyzer: