platforms/boards/pyboard/modpyb/Timer Examples

Pulse Width Modulation (PWM) @ 10 kHz on pins X2 and X3 in center mode
Each timer has a period register which can set either using freq= or prescaler= and period= Each timer can have multiple channels. A channel may be exposed on a pin (sometimes more than one channel (usually from different timers) are exposed on the same pin, but the pin can only choose one).
With PWM, the counter runs from 0..period and the pulse_width detemines how long the pulse stays active. Pin X2 is 25% duty cycle, and X3 is 50% duty cycle.
import pyb # TIM2 runs at 84 MHz # at 20000 Hz, count runs from 0 to 4199 # In center mode, the frequency will be halved, so we'll get a 10 kHz output t2 = pyb.Timer(2, freq=20000, mode=pyb.Timer.CENTER) ch2 = t2.channel(2, pyb.Timer.PWM, pin=pyb.Pin.board.X2, pulse_width=(t2.period() + 1) // 4) ch3 = t2.channel(3, pyb.Timer.PWM, pin=pyb.Pin.board.X3, pulse_width=(t2.period() + 1) // 2)
This is what the signal looks like on a logic analyzer:
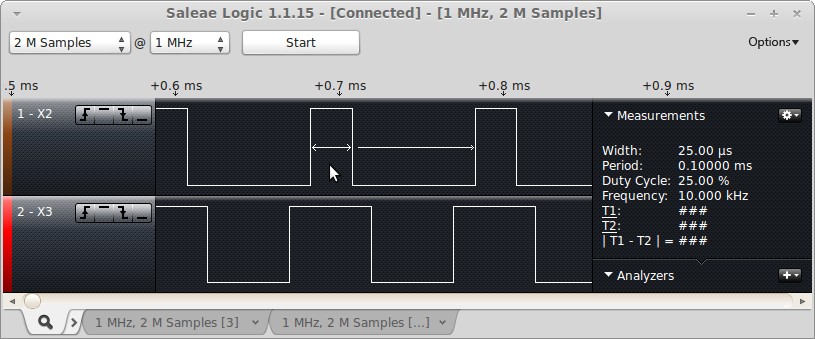
The top channel is set to generate a 25% duty cycle and the bottom is set to generate a 50% duty cycle. This example is also showing center-aligned PWM, where two channels from the same timer have their PWM pulses aligned in the center. You can also have them edge aligned, although center aligned is better in some cases; it reduces power spikes if you're using the PWM signal to drive a motor, then having both edges go active at the same time produces a larger power spike than having them staggered.
PWM performs 2 actions for each "cycle". When the counter reaches zero, it sets the output active (except when the pulse-width is zero), and when the counter reaches the pulse-width value, it sets the output inactive. This is what forms the output pulse.
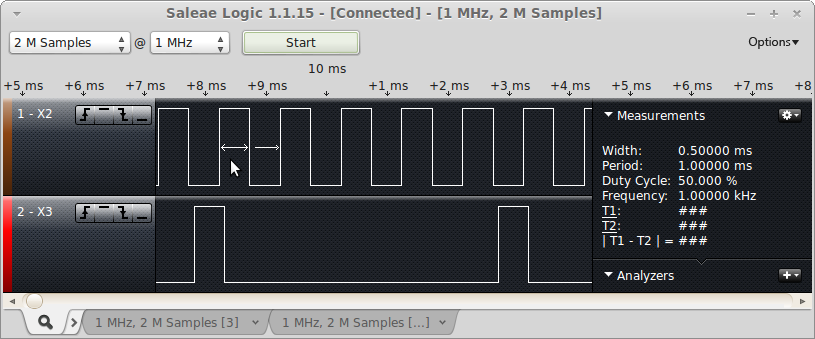
Output Compare (OC) Mode @ 1 KHz
Pin X2 is OC Mode producing a 1 KHz clock. Pin X3 is PWM at 200 Hz with a 10% duty cycle.
import pyb # setup oc_clock to be a 1 kHz clock. Since it toggles we want it to toggle # 2000 times per second to get a 1000 Hz clock. t2 = pyb.Timer(2, freq=2000) oc = t2.channel(2, pyb.Timer.OC_TOGGLE, pin=pyb.Pin.board.X2) # stup PWM to be 200 Hz with a 1 clock pulse_width t5 = pyb.Timer(5, prescaler=41999, period=9) pwm = t5.channel(3, pyb.Timer.PWM, pin=pyb.Pin.board.X3, pulse_width=1)This is what the signal looks like on a logic analyzer:
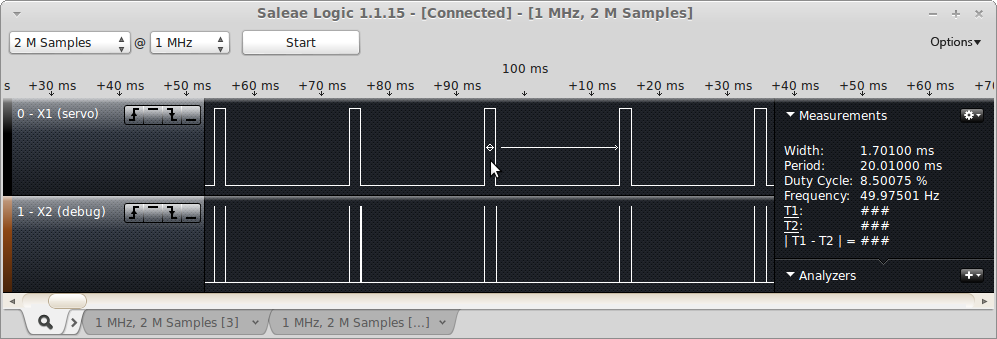
Input Capture (IC) Mode capturing a servo pulse.
Pin X1 is a servo generated pulse. There is a jumper wire connecting X1 to X4. Pin X2 is a debug pin which is pulsed from within the input capture interrupt routine.
import pyb import micropython # This script assumes that there is a jumper wire connecting X1 and X4 # For this example, we'll setup a timer in PWM mode to generate a servo pulse. # Using a prescalar of 83 gives a timer-tick frequency of 1 MHz (84 MHz / 84). # The period of 19999 gives a 20,000 usec or 20 msec period. The pulse width # is then in microseconds. servo_pin = pyb.Pin.board.X1 t5 = pyb.Timer(5, prescaler=83, period=19999); servo = t5.channel(1, pyb.Timer.PWM, pin=servo_pin) servo.pulse_width(1000) debug_pin = pyb.Pin('X2', pyb.Pin.OUT_PP) t2 = pyb.Timer(2, prescaler=83, period=0x0fffffff) ic_pin = pyb.Pin.board.X4 ic = t2.channel(4, pyb.Timer.IC, pin=ic_pin, polarity=pyb.Timer.BOTH) ic_start = 0 ic_width = 0 def ic_cb(tim): global ic_start global ic_width debug_pin.value(1) # Read the GPIO pin to figure out if this was a rising or falling edge if ic_pin.value(): # Rising edge - start of the pulse ic_start = ic.capture() else: # Falling edge - end of the pulse ic_width = ic.capture() - ic_start & 0x0fffffff debug_pin.value(0) micropython.alloc_emergency_exception_buf(100) ic.callback(ic_cb) pw = 1000 while True: servo.pulse_width(pw) pyb.delay(200) print("pulse_width = %d, ic_width = %d, ic_start = %d" % (pw, ic_width, ic_start)) pw = ((pw - 900) % 1100) + 1000
This is the output from the REPL:
>>> import ic_test
pulse_width = 1000, ic_width = 1000, ic_start = 179842
pulse_width = 1100, ic_width = 1100, ic_start = 399842
pulse_width = 1200, ic_width = 1200, ic_start = 599842
pulse_width = 1300, ic_width = 1300, ic_start = 799842
pulse_width = 1400, ic_width = 1400, ic_start = 999842
This is the logic analyzer output, zoomed in to show the debug pulses:
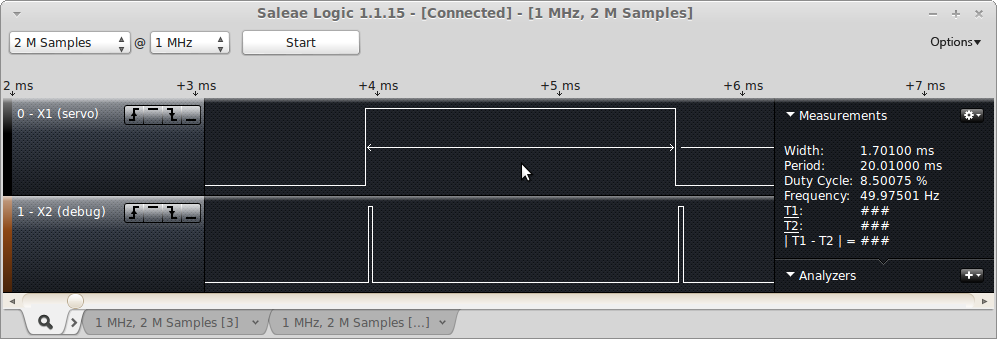
This is the logic analyzer output, zoomed out, to show the full servo pulse: